 Rixke Rail’s Archives
Rixke Rail’s ArchivesAccueil > Le Rail > Matériel roulant > Locomotives > La locomotive quadricourant type 160
La locomotive quadricourant type 160
J. Neruez, ingénieur principal.
lundi 31 décembre 2007, par
Toutes les versions de cet article : [français] [Nederlands]

Le problème des systèmes.
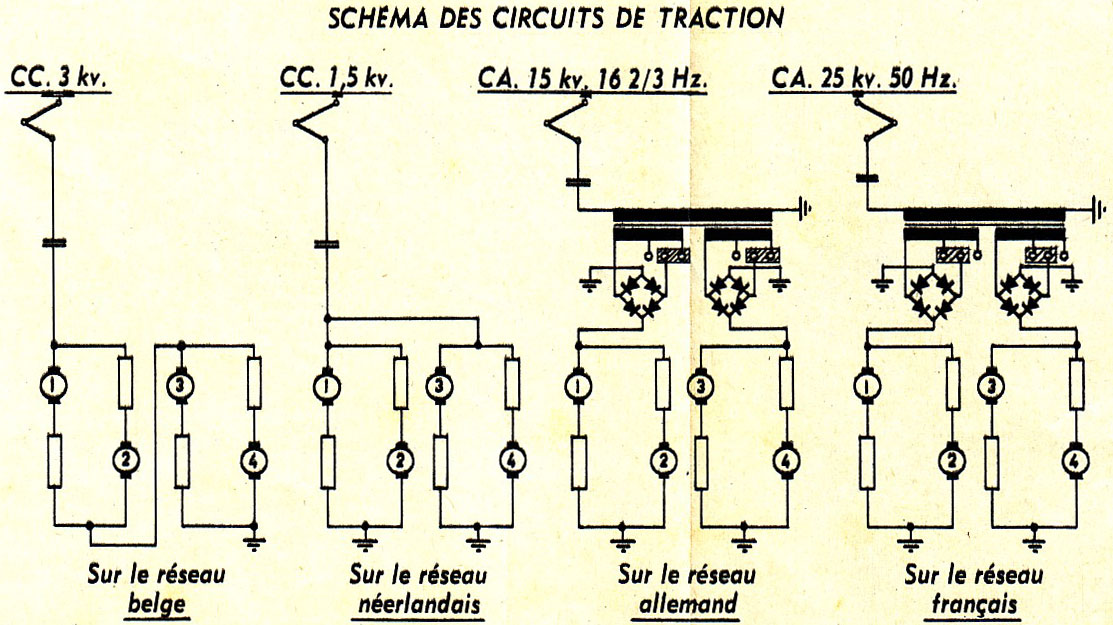
Comme nous l’avons déjà souligné (Le Rail de février 1961), quatre systèmes de traction électrique se sont développés au cours des temps ; ce sont : le courant continu à la tension de 1.500 volts, appliqué notamment aux Pays-Bas ; le courant continu à la tension de 3.000 volts, appliqué notamment en Belgique et au Grand-duché de Luxembourg ; le courant alternatif à la tension de 25.000 volts et la fréquence de 50 HZ, appliqué notamment dans le nord de la France et au Grand-duché de Luxembourg ; le courant alternatif à la tension de 15.000 volts et la fréquence de 16 2/3 HZ, appliqué notamment en Allemagne.
A l’époque où un réseau établit un programme d’électrification, il choisit le système qui, à ce moment, semble convenir le mieux pour lui, techniquement et économiquement. Comme les systèmes ne peuvent pas se « mélanger » et que le changement de système coûterait presque autant qu’une première électrification, chaque réseau, sauf dans des cas spéciaux, continue d’électrifier ses lignes suivant le système choisi à l’origine.
Quand une ligne internationale est électrifiée, on risque donc de se trouver, à la frontière, devant deux systèmes différents de traction électrique. C’est particulièrement ainsi dans notre cas : non seulement aucun des réseaux voisins n’a choisi notre système, mais avec eux nous totalisons les quatre systèmes !
Là où deux systèmes se joignent, la solution classique est de prévoir les changements de locomotives dans une gare de transition. Pour faciliter et accélérer le relais, cette gare est généralement munie de « voies commutables », c’est-à-dire de voies dont les lignes de contact peuvent être alimentées par l’un ou l’autre système.
Les engins moteurs « polycourant ».
Si, pour les trains de marchandises et certains trains de voyageurs, le changement de locomotive en gare de transition ne constitue pas une sujétion, en revanche, pour certaines relations rapides, il est souhaitable de disposer d’engins moteurs « polycourant », aptes à circuler à pleine puissance sur plusieurs systèmes de traction électrique sans devoir s’arrêter a la gare de transition, C’est ainsi que naquirent :
- les 12 automotrice Bénélux construites en commun par la S.N.C.B. et les N.S. et mises en service en 1957 sur la relation Bruxelles-Amsterdam (voir Le Rail n° 15) ;
- nos 5 locomotives « tricourant », mises en service en 1962, qui assurent, conjointement avec les locomotives « polycourant » de la S.N.C.F., la relation Paris-Bruxelles-Amsterdam (voir Le Rail n° 71).
La locomotive « quadricourant ».
Pour assurer la liaison directe Bruxelles-Cologne, un engin bicourant 3.000 V continu - 15.000 V 16 2/3 HZ est nécessaire : c’est le mariage technique le plus difficile. Une fois associés ces deux systèmes, on peut leur adjoindre le 1.500 V continu et le 25.000 V 50 HZ sans grandes difficultés techniques et sans supplément de prix appréciable. On a ainsi réalisé la locomotive électrique « universelle », capable d’évoluer sur tous les réseaux électrifiés européens. Pour la S.N.C.B., cette locomotive conférera le maximum de souplesse : elle pourra assurer des relations directes avec n’importe lequel des réseaux voisins.
La première des huit locomotives « quadricourant » construites par l’industrie nationale (Ateliers de Constructions électriques de Charleroi pour la partie électrique et La Brugeoise et Nivelles pour la partie mécanique) vient de sortir. Elle répond aux caractéristiques suivantes : longueur totale, 16,650 m ; type Bo-Bo (ce qui signifie deux bogies comportant chacun deux essieux moteurs mécaniquement indépendants) ; poids total en ordre de marche, 84 t ; vitesse maximale, 160 km/h , puissance, 3.760 ch.
La conception de cette locomotive « quadricourant » s’inspire directement de celle de notre « tricourant » ; on s’est efforcé d’y utiliser le maximum de pièces et même d’appareils semblables : c’est ainsi, par exemple, que les moteurs de traction sont identiques.
On s’est d’autre part adapté aux difficultés géographiques de la ligne Bruxelles-Cologne, qui comporte deux plans inclinés, l’un à Aix-la-Chapelle, l’autre à Liège. Ceux-ci requièrent un effort de démarrage plus important, ce qui engendre une sollicitation plus grande de l’équipement de démarrage.
Cette locomotive « quadricourant » comporte quatre moteurs de traction à courant continu de 1.500 V de tension nominale. En position finale, ces moteurs sont associés en parallèle sur le réseau 1.500 V continu et en série parallèle sur le réseau 3.000 V continu, aux fins d’avoir toujours 1.500 V à leurs bornes. En courant alternatif, un ensemble transformateurs-redresseurs au silicium convertit ce courant alternatif en courant continu : on dispose aux bornes des redresseurs d’une tension moyenne de 1.500 V sur laquelle on branche l’équipement de traction couplé comme pour le 1.500 V continu.
Le courant fourni par les redresseurs présente une ondulation importante : pour le rendre assimilable par les moteurs de traction du type continu, certaines dispositions complémentaires sont nécessaires. La commutation des circuits de traction, et subsidiairement des auxiliaires, est réalisée à vide par deux commutateurs de tension manœuvrés à distance par le conducteur à partir d’un sélecteur de tension installé sur son pupitre de conduite. Un dispositif de palpage confère toute la sécurité requise : il mesure la tension de la caténaire, contrôle la concordance de cette tension avec les circuits réalisés sur la locomotive et n’autorise la mise sous tension de la locomotive que s’il y a parfaite concordance. Toute discordance est sanctionnée par un refus d’alimentation qui évite toute avarie ; il appartient alors au conducteur de réagir devant son engin sans traction : l’engin ne répondra que lorsque l’erreur aura été levée.
Source : Le Rail, mai 1966